 消防车
特种车辆
水射流工程
水刀
奥 拓 福 水 刀立足品质 专业切割 专注水射流26年
消防车
特种车辆
水射流工程
水刀
奥 拓 福 水 刀立足品质 专业切割 专注水射流26年
400-871-5551
apw@apw.cn
沈阳市浑南新区浑南东路国际产业园日本园15-16号
 作者:admin
作者:admin
 来源:
来源:
 发布于:2022-06-28 08:49:54
发布于:2022-06-28 08:49:54
 浏览:4563
浏览:4563
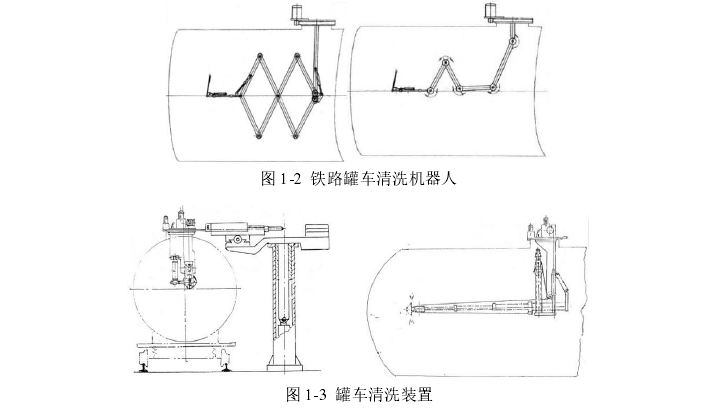
早在2007年程志学等发明了一种铁路罐车清洗机器人。如图1-2所示,该机器人可实现喷头在罐体内的长距离伸缩,该套装置虽然功能完备,但进给装置为纯机械结构,启停振动大,导致结构容易失效断裂。
为提高罐车洗罐器在罐体内部行走时的越障能力,也为了简化清洗机构,2013年孟昭兴等提出了一种柔性罐车清洗进给机构,如图1-4 (a)所示,喷头的夹持进给装置由弧形管来代替机械臂,结构更为轻巧,容易通过防波板、气相管等罐体内部障碍,但由于刚度较差,因此喷嘴射流压力较小,清洗质量不佳。为提高柔性伸缩进给装置的刚度,2015年张国柱等发明了一种新型油罐车清洗机,如图1-4 (b)所示,该清洗机包括:底座,喷头装置,喷头装置的水平调向及调距机构,以及喷头装置的升降进给机构等。水平和竖直伸缩机构实现了喷头装置在罐体内的正反旋转、掉头换向、水平伸缩,竖直升降等运动形式,尤其是水平伸缩动作由多关节挠性管组成,关节处的可靠固定有效改善了柔性管的整体刚度,因此可以承受更大的射流反冲力,清洗质量有了明显提高。

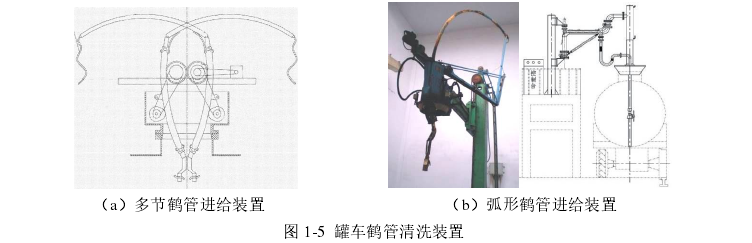
随着柔性管、挠性管伸缩装置在罐车清洗设备中的应用,罐车自动清洗设备的实用性得到了有效提高,适用范围也扩大了不少,因此众多学者开始了柔性清洗设备的研究与改进,使罐车内部清洗设备越来越成熟和完善,柔性伸缩机构也被更为先进的鹤管所代替,其中的典型代表为2016年何一千等提出了一种罐车清洗机构,如图1-5 (a)所示。
 400-871-5551
400-871-5551 
 订阅号
订阅号  知乎
知乎  抖音
抖音  快手
快手  今日头条
今日头条  售前咨询
售前咨询 

 公众号
公众号 
 全站地图
全站地图